When: Thursday 31st of March, 1PM AEDT
Where: The talk will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Armaghan Zafar
Title: Structured Numerical Method for Path-Graph Network Optimal Control Problems
Abstract:
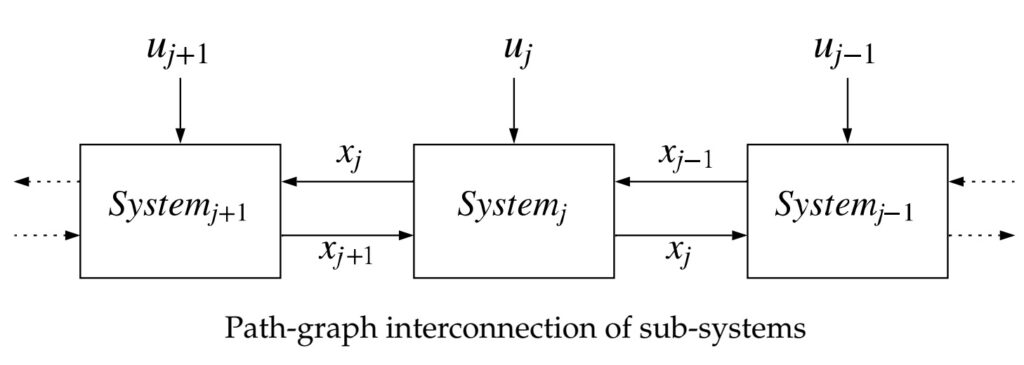
A structured numerical method will be presented for solving a class of constrained network optimal control problems with discrete-time dynamics arising from the path-graph interconnection of N heterogeneous sub-systems. Structured dynamics of this kind are relevant in the operation of irrigation channels, vehicle platoons, supply chains, and radial power networks. The size of the optimization problem grows with increase in the number of sub-systems N and the time horizon T. To solve large instances of such problems, involving potentially millions of variables, it is imperative to exploit the special spatio-temporal structure. In this talk, a structured preconditioned conjugate gradient (PCG) based solver is presented for implementing the Newton updates in second-order methods such as primal-dual interior point methods. The arithmetic complexity of each PCG step is O(NT ). The proposed preconditioning involves a fixed number of block Jacobi iterations per PCG step. A decreasing analytic bound on the effective conditioning is given in terms of this number. The associated computations are decomposable across the spatial and temporal dimensions of the optimal control problem, into sub-problems of size independent of N and T. Numerical results are provided for two example systems.
Bio:
Armaghan Zafar received his B.Sc in Electrical Engineering from UET Peshawar, Pakistan in 2013 and M.Sc in Electrical Engineering from NUST Islamabad, Pakistan in 2015. In 2017, he joined the Department of Electrical and Electronic Engineering, the University of Melbourne, Australia to pursue his Doctor of Philosophy (PhD) in Systems, Control and Automation Engineering. He received his PhD degree in July 2021. In January 2022, he joined the Australian Center for Field Robotics, the University of Sydney, Australia as a Postdoctoral Research Associate. His research interests lie in optimal control and convex optimization. He was involved in the development of structured and scalable numerical algorithms for the optimal control of large-scale path-graph networked systems such as automated water irrigation channels. Currently, his research is focused on building methods and theory in persistent monitoring and team orienteering for the observation and control of processes with complex and unstable spreading dynamics such as epidemics and wildfires.