When: Thursday 10th of June, 1pm AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speakers: Dr Yue Hu (Tokyo University of Agriculture and Technology), Dr Naoko Abe
Title: Towards Active Physical Human-Robot Interaction: An interdisciplinary project and perspective
Abstract:
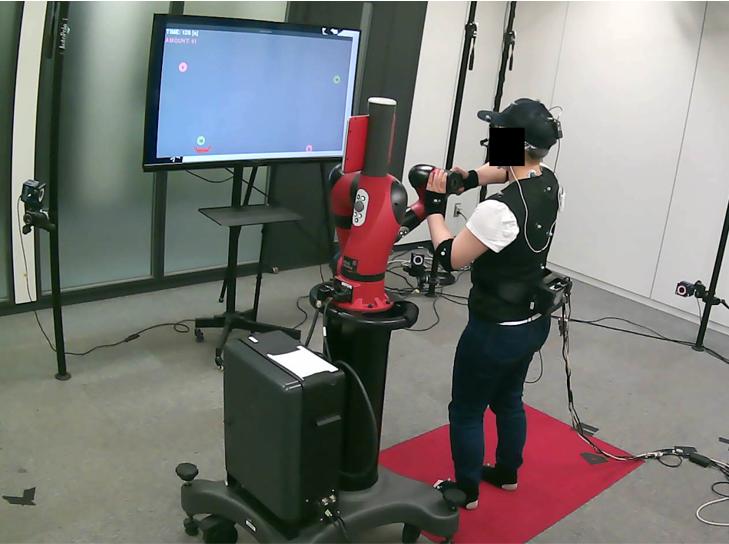
Robots are often represented in media culture as having incredible capabilities and intelligence and seen integrated rather well into human society. But as roboticists have well learned, real robots are still far from this possibility. Robots are kept at safety distances from human users and installed in isolated and controlled environments. Two research directions have been trying to breach the barrier between humans and robots: physically (pHRI) and socially (sHRI). However, these two directions have been evolving without many intersections; pHRI focuses mainly on the development of controllers to guarantee efficiency and physical safety while sHRI centralizes on the perception and mental state of the human. It is necessary to take into account both physical and social interactions for robots to coexist and collaborate with humans. In this joint talk, Dr Hu will present the experiment where she investigates an active physical human-robot interaction (active pHRI): a type of physical interaction in which the robot should be able to achieve tasks optimally, efficiently, and safely considering the perception of human users. Dr Abe will present her qualitative analysis of the interaction between the experiment participant and the robot during a task through the interview. The talk will also address some insights on the first results and perspectives in interdisciplinary project for future developments.
Bios:
Dr Yue Hu obtained her PhD from Heidelberg University, Germany, in 2017. She was then postdoc first at Heidelberg University, then at the Italian Institute of Technology (IIT). Between 2018 and 2020 she was a JSPS (Japan Society for the Promotion of Science) fellow at the National Institute of Advanced Industrial Science and Technologies (AIST) in Japan. She is currently assistant professor at the Department of Mechanical Systems Engineering, Tokyo University of Agriculture and Technology. Her research interests focus mainly on physical human-robot interaction, optimal control, human motion analysis, and humanoid robots.
Dr Naoko Abe is a sociologist, specialising in social interaction and human movement, with a research focus in Robotics and Urbanism. She obtained a PhD in Sociology from Ecole des Hautes Etudes en Sciences Sociales (EHESS, Paris) and a teaching certificate of Kinetography Laban from Paris Conservatory. She was a Postdoctoral Fellow at the Laboratory for Analysis and Architecture of Systems – the French National Centre for Scientific Research (LAAS-CNRS) between 2014 and 2015, and a Research Fellow at SIRIS/ACFR between 2018 and 2021. Her research interests include social robotics, motion-based human-robot interaction, and robots in public spaces.