When: Thursday 2nd of March, 1pm AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Wilhelm Marais
Title: Improving the capabilities of small underwater vehicle manipulator systems
Abstract:
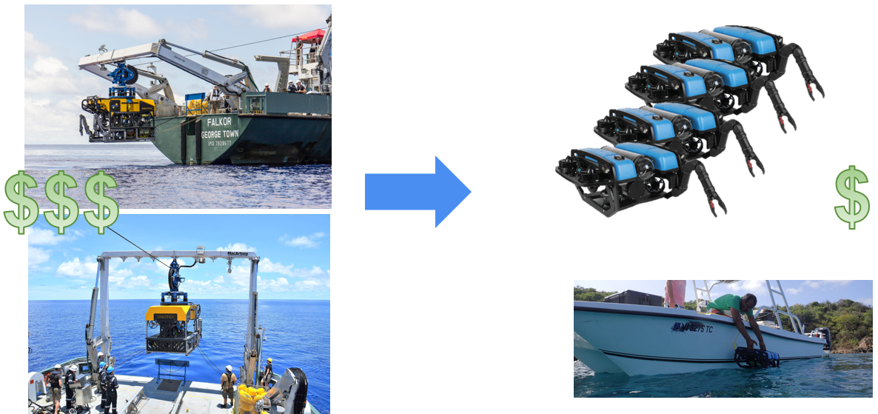
Underwater vehicles are often fitted with one or more manipulators to improve their capacity for physical intervention through additional degrees of freedom. These Underwater Vehicle Manipulator Systems (UVMS) have seen extensive applications in both commercial and research settings, although have traditionally been large and expensive, requiring a team of skilled operators. Recent developments in commercial small, low cost UVMS have greatly reduced costs and increased the accessibility of these systems, requiring only basic support equipment and a small number of less trained operators. Despite this, the reduced capability of small systems compared to their larger counterparts has limited the transition of many underwater intervention tasks.
In this work, three key areas of reduced capability are considered: increased susceptibility to disturbances from the environment, reduced operational time due to battery constraints, and reduced ability to exert forces and torques during physical intervention. Addressing each of these requires exploitation of the large number of degrees of freedom in these systems, allowing for flexibility in choosing configurations which simultaneously achieve a desired end effector pose, while having additional desirable properties. Through parameterisation of this kinematic redundancy, optimisation problems can be posed which can efficiently search the available configuration space without requiring highly non-linear inverse kinematics constraints. By further separating these problems into convex and non-convex subproblems, techniques in bi-level optimisation can be used to efficiently find good solutions. In addition, careful consideration of the particular kinematic and dynamic constraints and models required for the various scenarios is detailed.
The proposed frameworks provide flexible algorithms for maximising the performance of any UVMS with regard to the three areas which are addressed, leading to reduced end effector pose errors under disturbances, reduced power consumption in periodic flows, and increased wrench capability during interaction tasks. This work demonstrates the effectiveness of these methods relative to previous approaches under relevant scenarios, using both a high fidelity simulation environment and hardware experiments.
Bio:
Wilhelm Marais is a PhD candidate in the marine group at ACFR, focusing on control, optimisation and kinematics, specifically looking at systems with high degrees of kinematic redundancy.