When: Thursday 30th of March, 1pm AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Fletcher Fan
Title: Learning Stable Koopman Models for Identification and Control of Dynamical Systems
Abstract:
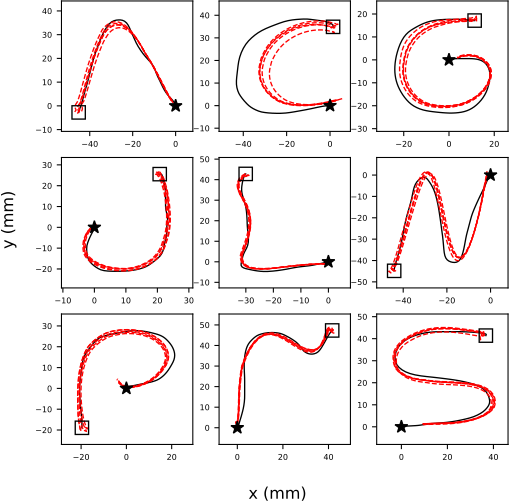
Modelling dynamical systems is a widely-studied problem in control theory and machine learning. One recently popular approach for modelling nonlinear systems is the class of Koopman models, which hold the promise of linearising a nonlinear system globally, allowing for the analysis and control of nonlinear systems using tools from linear systems theory. However, many recent methods for Koopman learning do not consider the stability of the model, which can lead to poor performance on prediction and control tasks.
In this talk, new classes of Koopman models are proposed, which attempts to bridge the gap between Koopman methods and learning stable nonlinear models. These models are guaranteed to be stable and are unconstrained in their parameter sets, thereby enabling efficient optimization via gradient-based methods. Theoretical connections between the stability of Koopman models and forms of nonlinear stability such as contraction are established. Experimental results show empirically that the proposed models achieve better performance over prior methods without stability guarantees.
Bio:
Fletcher Fan received his Bachelor of Mechatronics Engineering from the University of Sydney in 2016. He has been a PhD student at the ACFR since 2017, currently under examination. His research interests include safe and robust machine learning.